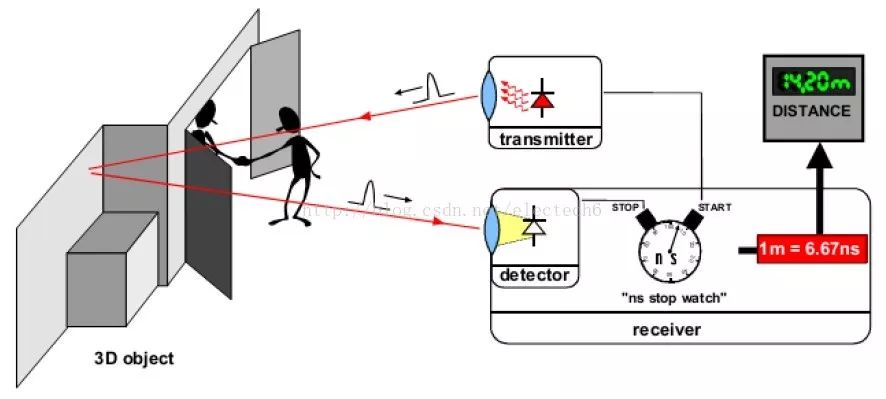
SLAM(定位与地图构建)技术在手机和AR眼镜中得到了广泛应用。对于AR眼镜而言,SLAM是必不可少的底层技术,而深度相机则是支撑SLAM的关键。在各种深度相机方案中,适合在AR眼镜上使用的是ToF(Time of Flight)技术。ToF通过光的飞行时间计算距离,基本原理是发射调制过的光脉冲,接收物体反射的光脉冲,并根据光脉冲的往返时间计算距离。ToF的小型化和低成本依赖于集成电路与传感器技术的突破。相比之下,结构光技术通过投射具有结构特征的光线到物体上,并采集反射的结构光图案进行深度信息计算。ToF技术较结构光技术更利于设备的小型化。虽然结构光的计算量少、功耗低,近距离精度高,但在室外和远距离下存在缺陷。综合来看,ToF技术在AR眼镜的设备小型化和实时三维建图方面具有优势,但近距离手势识别精度还需提高。未来,将出现更广泛应用于AR眼镜的三维测量方案。
 Insider
Insider