
(
映维网Nweon
2024年08月08日
)通常,XR应用要对现实世界环境中存在的平面进行估计。平面估计是使用各种传统设备和技术,例如,在扩展现实图像中放置虚拟物体。然而,传统的设备和技术存在一定的限制,导致对现实环境中存在的平面进行不准确的估计。当使用这种不准确的平面估计时,从视点上看,它的深度同样会不准确,这将导致虚拟对象在扩展现实图像中的位置不正确。
在由美国专利商标局公布的一份专利申请中,Varjo就提出了一种使用对象检测来进行平面估计的方法。
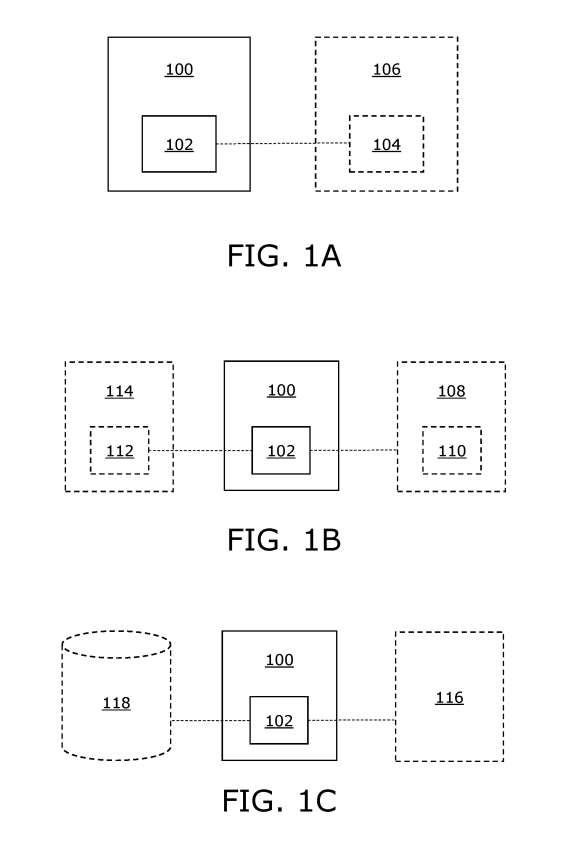
在一个实施例中,获取至少两幅真实世界环境的图像,其视场至少部分重叠;获取指示从其捕获至少两个图像的相应camera姿态的姿态信息;在至少两幅图像中,检测至少一个与现实世界环境中存在的给定平面接触的对象;在至少两幅图像中,识别位于给定平面的至少一个对象的相同特征。然后,确定相同特征的姿态,其中基于至少两个图像中给定相同特征的2D位置的差异和从中捕获至少两个图像的相应camera姿态来确定给定相同特征的姿态。最后,基于相同特征的姿态估计给定平面。
……(全文 3054 字,剩余 2637 字)
映维网会员
请登录
SCC板块
阅读完整文章
PICO、大朋等公司员工可联系映维网免费获取权限