(映维网Nweon 2025年04月17日)苹果认为,当前的图像数据分析技术在预测对象运动方面存在不足。例如,为了预测人体活动,可以将帧的视频序列馈送到网络中,并且可以基于视频的整体获得对视频序列的预测。然而,若不使用图像数据,获得用户活动的实时预测将存在问题。
所以在一份申请中,苹果表示可以通过头戴式设备的磁力计数据来估计用户动作。具体来说,这项发明主要是用于管理估计的用户操作重复计数。
再具体来说,这项技术主要用于撸铁举铁,亦即杠铃,哑铃等可托举的健身器械。
在一个实施例中,发明主要描述了一种用于估计和追踪用户活动的低功耗技术。特别是,用户可以佩戴具有磁力计或其他可用于检测局部磁场变化的传感器的设备。设备可以在用户使用一个或多个铁磁物体进行重复运动时佩戴。
根据磁力计收集的传感器数据,可以确定用户运动的一个或多个特征。例如,可以确定用户动作类型、运动速率、重复次数等。然后可以通过通知将重复计数提供给用户。
在一个实施例中,可穿戴设备可以放置两个或多个磁力计和/或其他传感器,以用于检测局部磁场中的变化。每个磁力计都可以捕获传感器数据,并且可以检测到运动的附加特性。例如,可以使用每个磁力计捕获的传感器数据以及头戴式设备磁力计的相对位置进行定位。
例如,如果用户正在举起包含铁磁性材料的重物,则可以使用组合传感器数据来确定重物的运动和位置,进而估计执行动作的手臂运动和位置。
在一个实施例中,可以使用附加的传感器数据来改进运动的估计。例如,头戴式设备可以另外具有动捕传感器,例如惯性测量单元(IMU),并因而可以确定设备的方向。
根据一个或多个实施例,用户活动的估计由低功率设备执行,并且设计为需要最小的功率或其他资源。
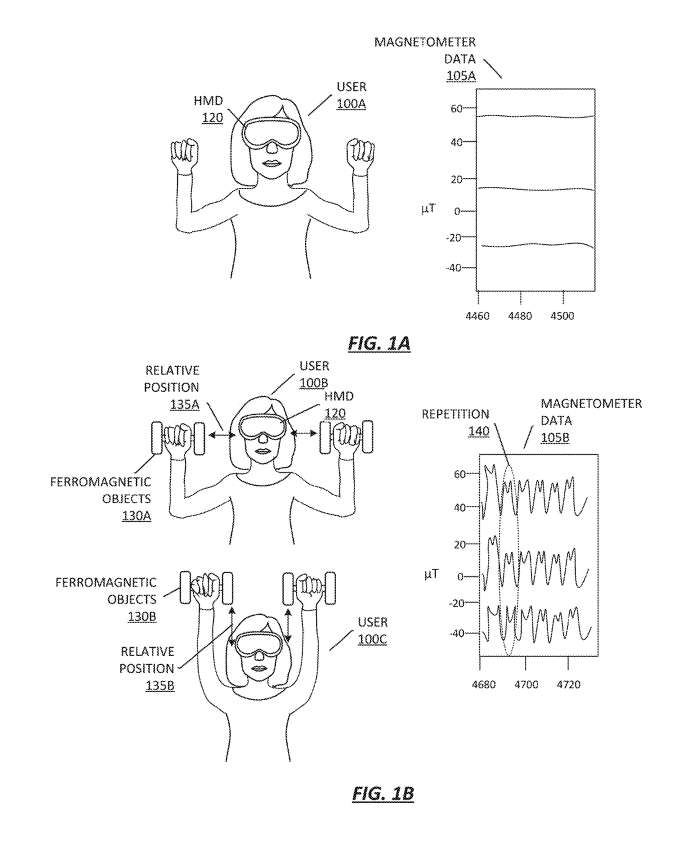
图1A示出用户佩戴头戴式设备120。头戴式设备120可以包括配置为收集有关环境的数据的传感器。传感器包括一个或多个磁力计。一个或多个磁力计中的每个磁力计可以包括配置为沿x, y, z坐标系测量磁场位移的三轴磁力计。每个磁力计可以配置为当铁磁性物体在附近移动时检测局部磁场的畸变。
在一个实施例中,头戴式设备120可包括可用于确定用户运动特征的附加传感器。例如,设备可以另外包括运动检测传感器,诸如惯性测量单元、陀螺仪、加速度计等,其配置为测量用户的旋转和/或头部姿势。换句话说,由于头戴式设备戴在用户的头上,由运动检测传感器数据确定的设备方向可用于推断用户头部的姿势。
根据一个或多个实施例,一个或多个磁力计可以连续捕获与局部磁场变化有关的磁力计数据105A。根据数据,设备120可以根据铁磁选项估计用户运动的特性。
在图1A中,没有显示用户100A与任何铁磁性物体接触。因此,磁力计数据105A没有显示任何与特定时间段内跟踪的局部磁场变化有关的数据。
图1B描述了使用铁磁性物体130执行运动的用户。例如,哑铃可以由铁或其他铁磁性材料组成。在第一位置,用户100B显示为初始姿态。因此,铁磁性物体130位于靠近用户头部的相对位置135A,从而靠近头显120中的磁力计。
根据一个或多个实施例,头显120中的磁力计因此可以记录由于铁磁性物体130接近磁力计而产生的相对较强的局部磁场畸变。
在稍后的时间,如用户100C的第二个位置所示,用户100C在进行上举动作时显示为后续姿势。因此,铁磁性物体130处于相对位置135B,并且已远离用户头部,从而远离头显120中的磁力计。
根据一个或多个实施例,头显120中的磁力计因此可以记录由于铁磁性物体130到头显120中的磁力计的距离增加而减小的局部磁场畸变。
由此产生的磁力计数据105B显示了局部磁场在运动期间随时间的畸变。当用户100使用涉及将铁磁物体移动到相对于磁力计的不同位置的铁磁物体执行重复运动时,可以在所得到的磁力计数据中追踪所述相对位置的模式。
在一个实施例中,可以针对不同的用户运动和/或不同的铁磁性物体在不同的磁力计数据训练一个或多个网络,从而在运行期间可以追踪运动的特性。
根据一个或多个实施例,头显120可包括可用于确定用户运动特征的附加传感器数据。例如,头显120可以包括运动捕获传感器,例如IMU、陀螺仪、加速度计等,其捕获与设备的运动相关的传感器数据,由此可以确定设备的方向。
在一个实施例中,由运动检测传感器数据确定的设备方向可用于推断用户头部的姿势。磁力计数据105B可以修正为静态全局框架。作为另一个示例,头显120可以包括一个或多个摄像头,例如面向用户的以自中心摄像头、朝外场景摄像头等。
在一个实施例中,由一个或多个摄像头捕获的摄像头数据可以捕获可从中确定用户姿势的图像数据。在一个实施例中,头显120可以根据摄像头数据确定用户已经开始要追踪的运动,并且可以相应地触发对磁力计数据的捕获和/或分析。
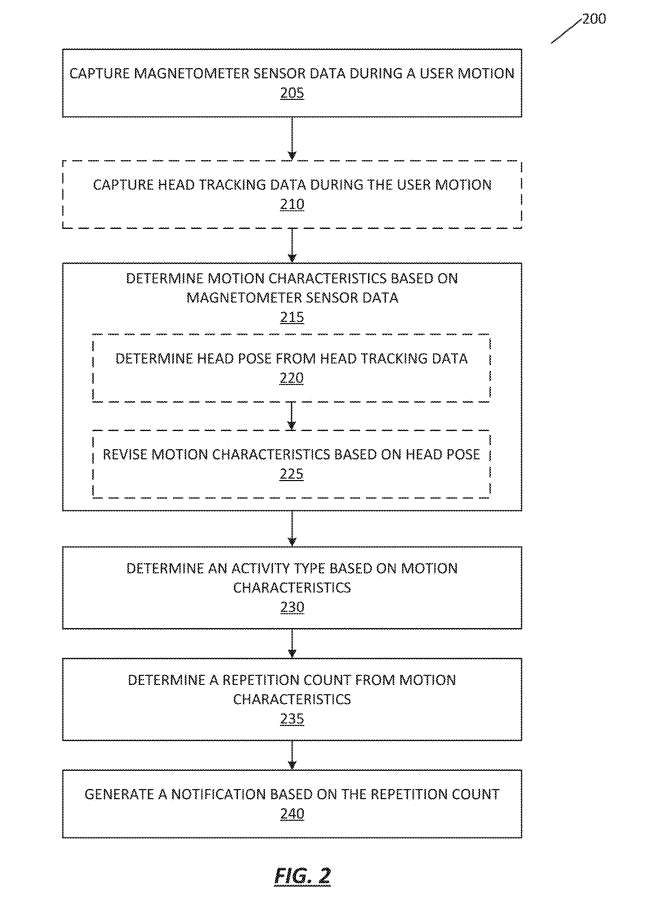
图2显示了预测用户活动重复计数的技术流程图。
从205开始,其磁力计传感器数据在用户运动期间捕获。根据一个或多个实施例,磁力计可以沿x、y、z坐标系捕获磁场位移。在这样做时,每个磁力计可以配置为当铁磁性物体在附近移动时检测局部磁场的畸变。
在210,可选地,在用户运动期间捕获头部追踪数据。例如,设备可以另外包括运动检测传感器,诸如惯性测量单元(IMU)、陀螺仪、加速度计等。
在215,基于磁力计传感器数据确定用户运动的一个或多个运动特性。特别是,运动特性可以指示用户如何使铁磁物体相对于磁力计运动的特性。根据一个或多个实施例,可将磁力计传感器数据应用于经过训练以检测指示特定用户运动的模式的网络。
任选地,如220所示,可以从在210收集的头部制造数据确定头部姿态数据。根据一个或多个实施例,如果设备是头戴式设备,则可以根据设备的姿势信息确定头部姿势数据。
在230,基于运动特征确定活动类型。在一个实施例中,确定活动类型可包括基于磁力计传感器数据确定正在执行重复运动。另外,可基于设备捕获的磁力计数据和/或其他传感器数据确定一类活动。在一个实施例中,活动类型由经过训练的模型确定,模型配置为根据活动类型对磁力计数据和/或其他传感器数据中的特征进行分类。
在235,根据所述运动特性确定所述活动的重复计数。发明所述技术可由配置为追踪涉及铁磁性物体的重复活动的应用程序使用,例如涉及举重的运动。可以训练网络来检测磁力计数据特征的重复或与特定活动相关的其他趋势。在这样做时,可以根据在磁力计数据中检测到的模式确定重复计数。
在235,根据重复计数生成通知。根据一个或多个实施例,可以使用视觉反馈、音频反馈等向用户报告重复计数。
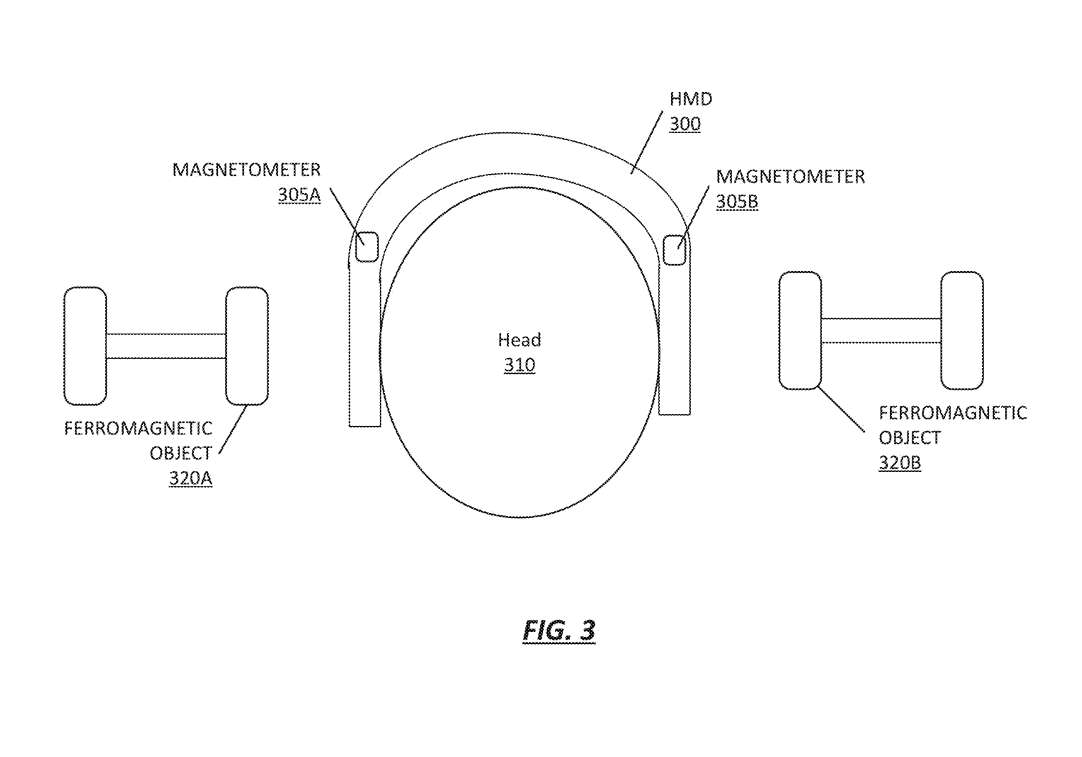
图3显示了使用头显来检测涉及铁磁性物体的活动的示例系统图。
头显可包括各种传感器,包括多个磁力计,如磁力计305A和磁力计305B所示。多个磁力计的使用可以增强定位技术,从而允许头显300确定关于用户运动的附加特性。例如,当用户将铁磁物体320A向头部310举起时,磁力计305A和磁力计305B都可以检测到局部磁场的相应变化。而305A磁力计探测到的局地磁场变化会比305B磁力计探测到的局地磁场变化更强。
根据磁力计305A和磁力计305B之间预先确定的空间关系,以及/或磁力计305A和磁力计305B在头显300的已知位置,可以确定铁磁物体320的位置信息。
例如,由于磁力计305A检测到的局部磁场变化比磁力计305B检测到的局部磁场变化更强,并且已知磁力计305A位于设备的左侧,而已知磁力计305B位于设备的右侧,因此可以确定铁磁物体320A的运动是由左臂进行。
使用两个磁力计也有助于识别铁磁物体的异步运动。例如,如果用户在交替的二头肌旋度运动中交替举起铁磁物体320A和铁磁物体320B,则会出现一种模式,即在举起铁磁物体320A时,磁力计305A首先检测到强信号,而磁力计305B检测到弱信号。
当铁磁物体320B上升时,磁力计305B探测到强信号,磁力计305A探测到弱信号。因此,不仅可以计算运动的重复次数,而且可以通过集体传感器数据检测交替二头肌卷曲的特征。
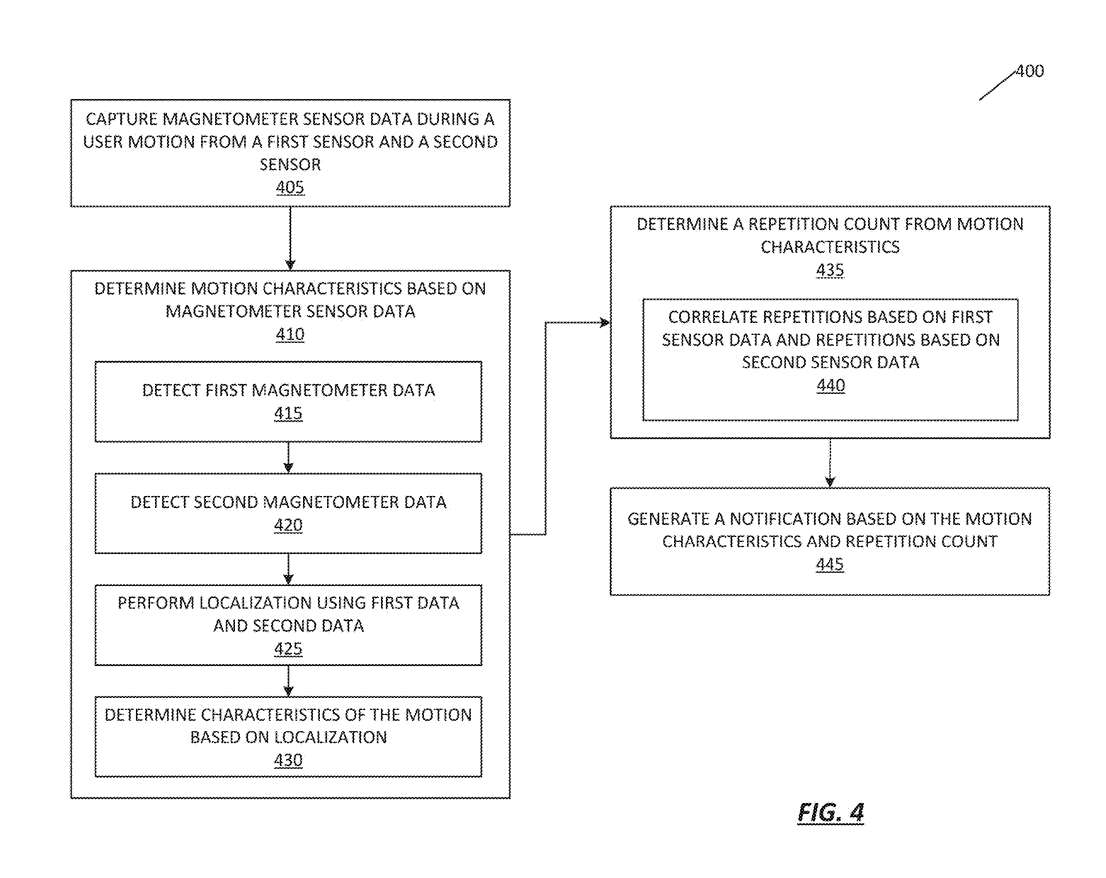
图4示出使用多个磁力计确定用户操作的技术。
从405开始,在用户运动期间从多个磁力计(包括第一磁力计和第二磁力计)捕获磁力计传感器数据。
在410,基于磁力计传感器数据和/或其他相机数据或其他传感器数据确定用户运动的一个或多个运动特性。特别是,运动特性可以指示用户如何使铁磁物体相对于磁力计运动的特性。
在415,检测第一磁力计数据;在420,检测第二磁力计数据。第一磁力计数据可由第一磁力计捕获,而第二磁力计数据可由第二磁力计捕获。
在425,基于来自第一磁强计和第二磁强计的传感器数据进行定位。根据一个或多个实施例,使用来自第一磁力计和第二磁力计的传感器数据进行定位包括估计引起局部磁场变化的物体的位置和/或方向,例如铁磁性物体。
在430,根据定位确定运动的特征。例如,如果设备一侧的磁场变化比另一侧强,则可以确定某只手臂正在进行运动。作为另一个例子,可以根据定位确定特定的运动类型,例如用户将铁磁物体移向或远离设备的方向。
在435,根据运动特性确定重复计数。
在一个实施例中,来自第一磁力计和第二磁力计的传感器数据可用于确定包括两条移动铁磁物体的手臂运动。
在440,重复基于第一传感器数据和第二传感器数据进行关联。
在445,根据重复计数生成通知。根据一个或多个实施例,可以使用视觉反馈、音频反馈等向用户报告重复计数。
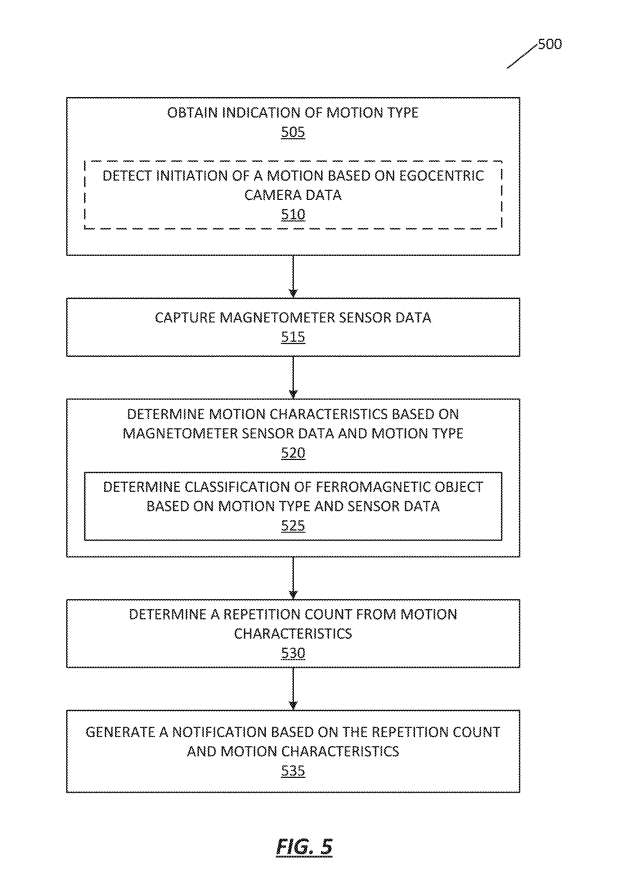
图5示出确定用户活动的运动特性。
从505,获得运动类型的指示。根据一个或多个实施例,指示可以通过与磁力计不同的一个或多个传感器检测。如可选510所示,可以基于以自中心的摄像头数据检测运动的指示。
换句话说,头戴式设备可以捕获用户的图像数据,并使用身体追踪或其他技术来估计用户正在执行的姿势或动作。根据一个或多个实施例,如果数据表明用户正在执行要由磁力计数据追踪的运动,则可以启动估计过程。
在一个实施例,自中心摄像头可以切换到低功耗模式或在用户执行活动时关闭电源,并使用磁力计数据追踪重复晕动,从而节省头戴式设备的资源。在这种情况下,如果磁力计传感器数据不再对应于所确定的运动类型,则摄像头可以通电并用于确定运动类型。
在515,磁力计传感器数据由一个或多个磁力计捕获。在一个或多个实施例中,一个或多个磁力计响应于开始的估计过程而触发。
在520,根据磁力计传感器数据和/或运动类型确定运动特性。
在530,基于所述运动特性确定所述运动的重复计数。
在535,根据重复计数生成通知。根据一个或多个实施例,可以使用视觉反馈、音频反馈等向用户报告重复计数。
相关专利:Apple Patent | Estimation of motion repetition using local magnetic field distortion
名为“Estimation of motion repetition using local magnetic field distortion](h”的苹果专利申请最初在2024年8月提交,并在日前由美国专利商标局公布。