
(
映维网Nweon
2024年12月18日
)Apple
Vision
Pro为需要视觉矫正的用户提供了定制光学插片支持。不同的定制光学插片有着不同的特征或参数。在一份专利中,这家公司介绍了如何利用反射来识别透镜特征,例如光学插片的参数,从而根据确定的透镜特征来提供内容。
在一个实施例中,图像传感器捕获光学插片的图像,包括由从光学插片的前表面和/或后表面反射的光引起的反射。所述光可由多个光源产生。不同屈光度的光学插片将产生不同的反射。所以,由给定透镜的一个或多个图像捕获的反射排列可用于确定透镜的屈光度。
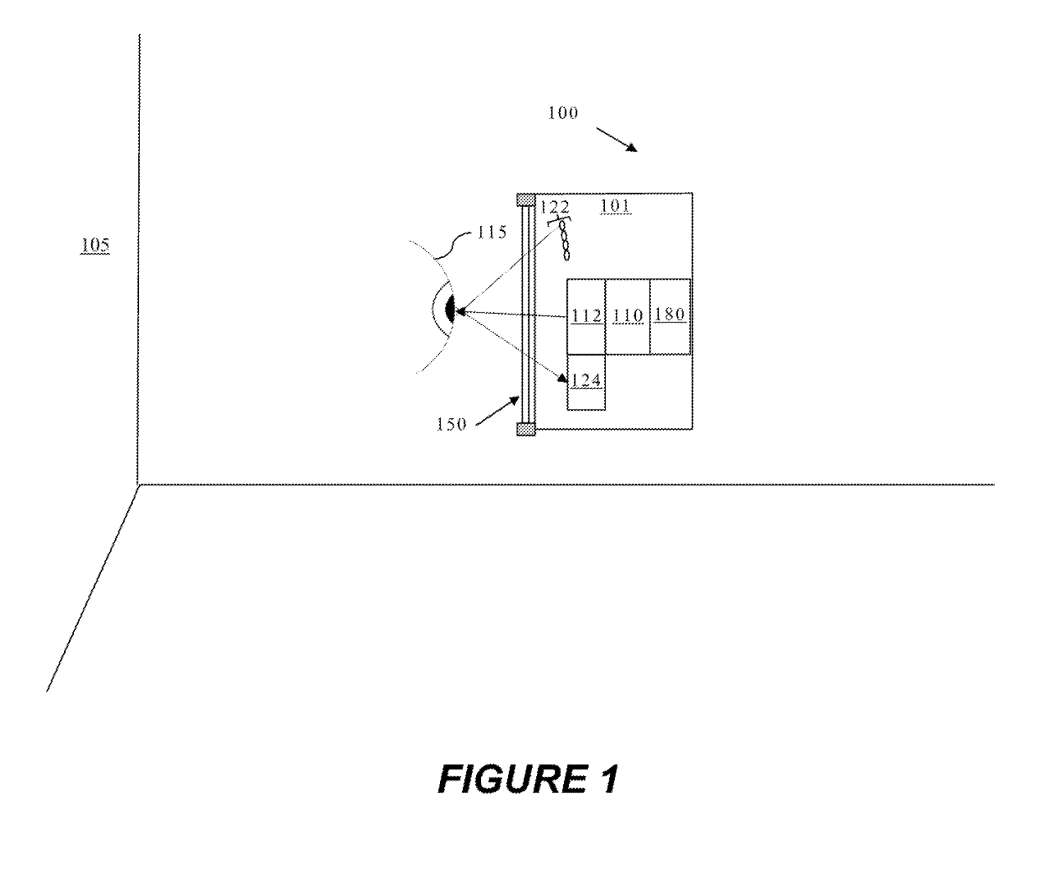
图1示出电子设备100。透镜150可以可拆卸地或永久地附着到电子设备100。透镜150可以是具有屈光度的矫正光学插片。在这种配置中,透镜150可以帮助用户115准确地看清显示器110。
然而,为了支持电子设备100准确地为用户115提供内容,电子设备100需要知道关于透镜150的特征或参数。电子设备100访问关于一个或多个透镜150信息的一种方法是检测由透镜150的第一表面(例如前表面)和/或第二表面(例如后表面)引起的一个或多个光源122的反射。
在一个实施例,可以使用传感器检测由透镜150引起的一个或多个光源122的反射。例如,由透镜表面引起的一个或多个光源122的反射可以由图像传感器124捕获,并且其中包含的信息可以由控制器180解码并用于修改电子设备100的操作。
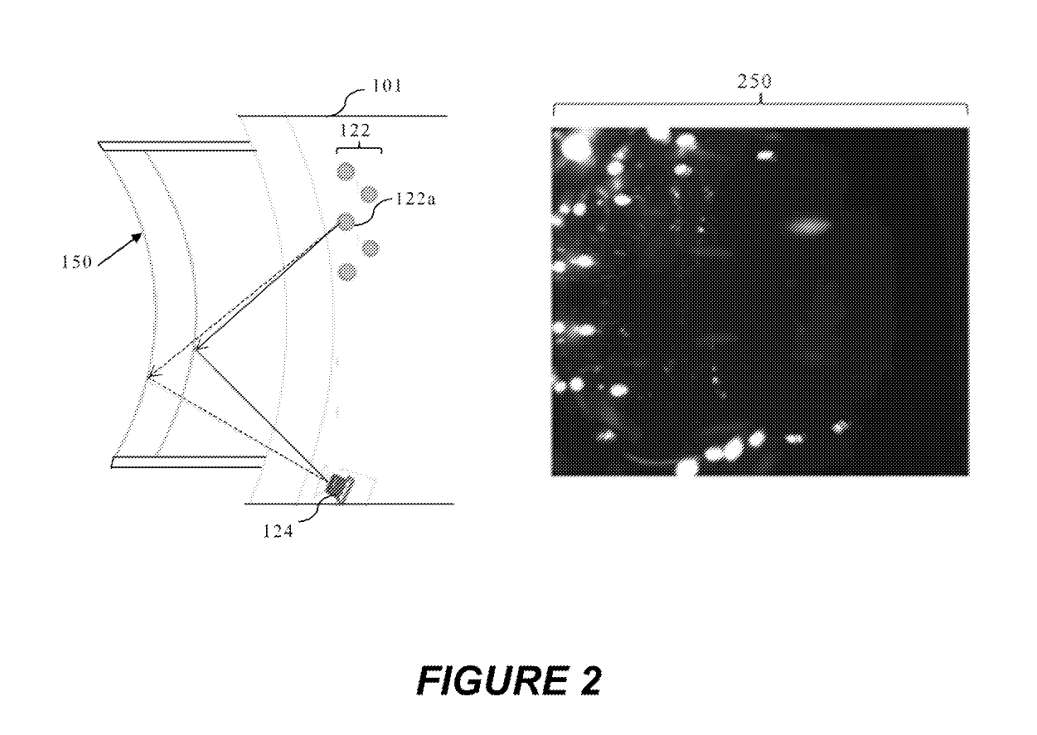
图2示出反射图像250,包括在透镜150的前表面152和后表面154的反射。在图像传感器124捕获的图像250中可检测到来自透镜150的前表面152和后表面154的反射对。例如,反射220-1a和反射220-1b形成一对对应于单个光源的反射220-1。可以根据图像250中彼此的空间关系(例如接近度)检测对应于单个光源的反射对。
图2同时示出用于从透镜150前表面152反射到图像传感器124的光路240。这条光路240显示为一条实线。用于从透镜150后表面152反射到图像传感器124的光路250表示为虚线。
在一个实施例中,在图像传感器124捕获的图像250中,使用由透镜150引起的光源122的反射图案来确定电子设备100使用的透镜150的特征。例如,图像250中的反射图案可用于确定透镜150的参数,比方说近视眼、远视、屈光度等。光源122的反射图案可另外或可选地用于确定电子设备100中透镜150的位置或方向。
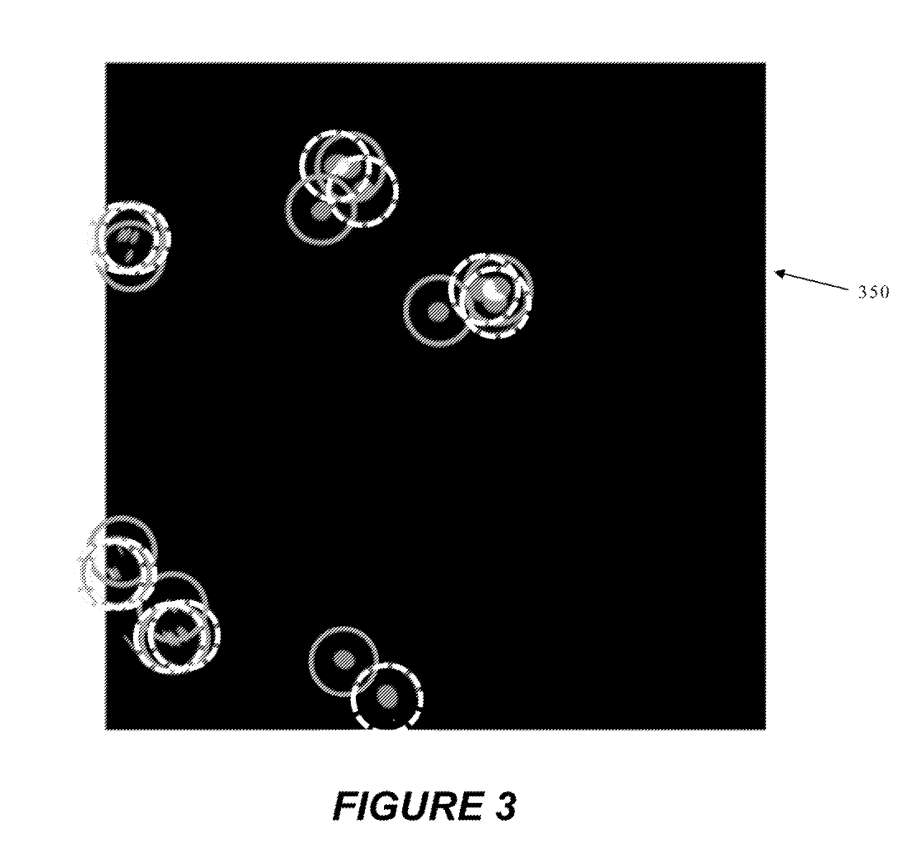
图3示出反射图像350。所述反射的图案取决于所述透镜150的屈光度、所述光源122的特征以及所述光源122、所述透镜150和所述图像传感器124之间的三维空间排列。由于不同的透镜屈光度将产生不同的反射图案,所以可以使用检测到的图案来检测附着在电子设备100的透镜150的屈光度。典型的近视屈光度在0-9或以上。
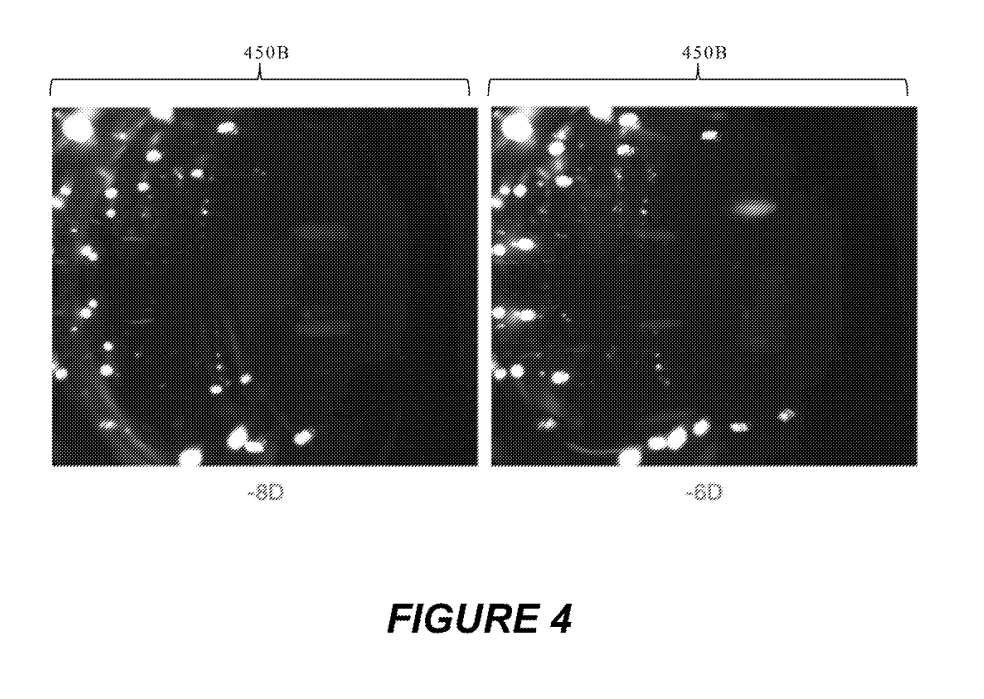
图4示出两个反射图案图像450A、450B。从具有第一屈光度的示例透镜的图像传感器124在图像450A中捕获由光源122引起的反射对的第一图案。从具有第二种不同屈光度的示例透镜的图像传感器124在图像450B中捕获由光源122引起的第二种不同的对反射图案。当捕获示例图像450A、450B时,光源122和图像传感器124具有相同的配置。
在一个实施例中,用于确定透镜150的透镜特征(例如屈光度)的反射图案基于每个反射的中心点或质心。可以基于在一个或多个图像中的反射的位置和形状来检测图案。在一个实施例中,可以基于一个或多个图像中的反射的位置、强度和形状来检测图案。
在一个实施例中,使用算法或机器学习模型来确定附着在电子设备的透镜的屈光度。机器学习模型可以使用为特定设备配置生成的ground truth图像进行训练。一系列透镜特征的真实图像可用于训练机器学习网络。训练完成后,将一个或多个附加透镜的图像输入到机器学习网络中,并输出相应的确定透镜特征。
在一个实施例中,光源122和图像传感器124之间的3D空间排列已知或预定(例如基于工厂校准)。另外,可以估计透镜150的标称位置,然后用于确定透镜150的实际姿态。可以通过使用有关光源122、图像传感器124和透镜150之间的空间排列的实际信息来改进透镜特性测定的准确性。器件配置评估可以基于将图案中的每个反射分配给光源122和透镜150的前表面或后表面的各自光源。
在一个实施例中,透镜150的实际位置和/或方向可以基于有关设备和透镜150反射的信息来确定。透镜150的实际位置和/或方向可以基于光源122和图像传感器124的位置和/或方向来确定。透镜150的实际位置和/或方向可以基于成像系统中的光学元件来确定。透镜150的实际位置和/或方向可以基于确定由透镜150的前/后表面反射到图像传感器124的每个光源122之间的光路或光线跟踪来确定。
换句话说,由于反射模式发生在图像传感器124的2D图像空间中,并且图像传感器124和光源122的3D信息已知,所以可以使用一系列已知技术来确定透镜150的实际位置和/或方向。
在一个实施例中,电子设备100使用基于透镜150的表面反射图案确定的透镜特征来调整用于显示器110的渲染过程,例如减少或纠正失真。在另一示例中,可以从透镜150的反射图案识别透镜150的空间定位的微小位移,并使用显示器110的渲染处理进行校正。或者,当检测到透镜150的空间定位出现大幅位移时,可以提供重新附接透镜150的提示。
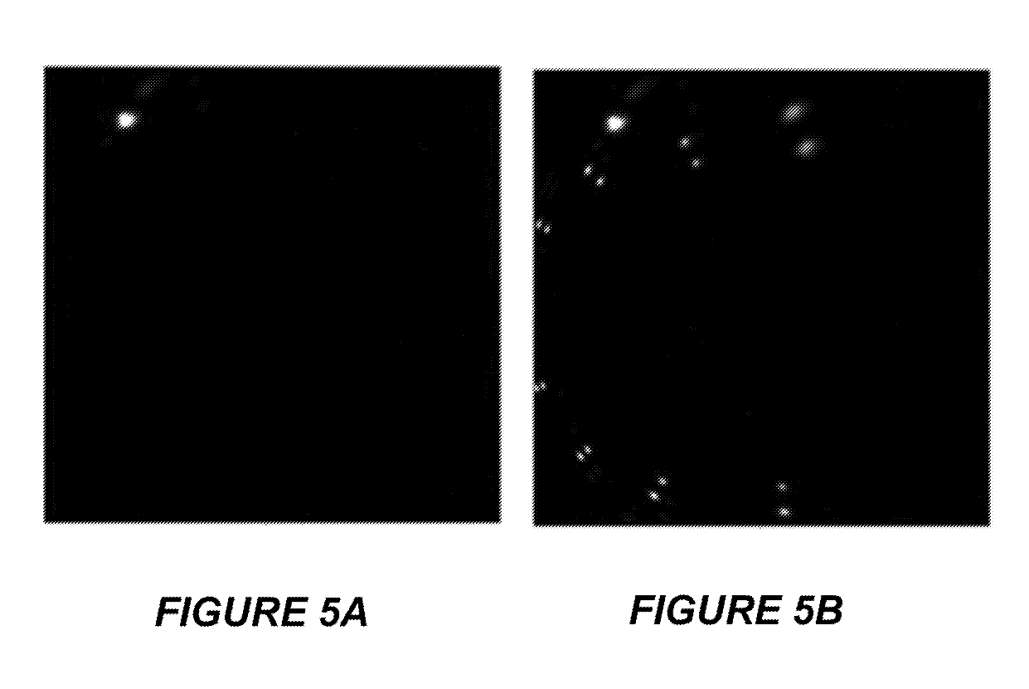
图5A-5B示出在检测过程中捕获的两个示例图像。如图5A所示,图像传感器124捕获的图像550A未检测到电子设备100中透镜的存在。图5A中的图像550A可以包括由成像系统中的其他透镜或光学元件引起的静态反射530。
相反,如图5B所示,由图像传感器124捕获的图像550B检测电子设备100中透镜的存在。图5B中的图像包括反射图案。因此,基于来自图像传感器124的单个图像,透镜存在检测过程确定是否已将透镜添加到校准光源122和图像传感器124中。在一个实施例中,透镜存在检测过程包括基于静态反射或已知组件几何形状的滤波。
在一个实施例中,为了更准确地确定所安装透镜的屈光度,验证所安装透镜的位置和/或方向。为了正确确定所安装透镜的位置和/或方向,电子设备100可以识别哪对反射对应于哪个光源,以及每对反射的前表面反射和后表面反射。
在一个实施例中,通过每次打开光源122的每个光源并检测相应的反射对来确定光源分配。
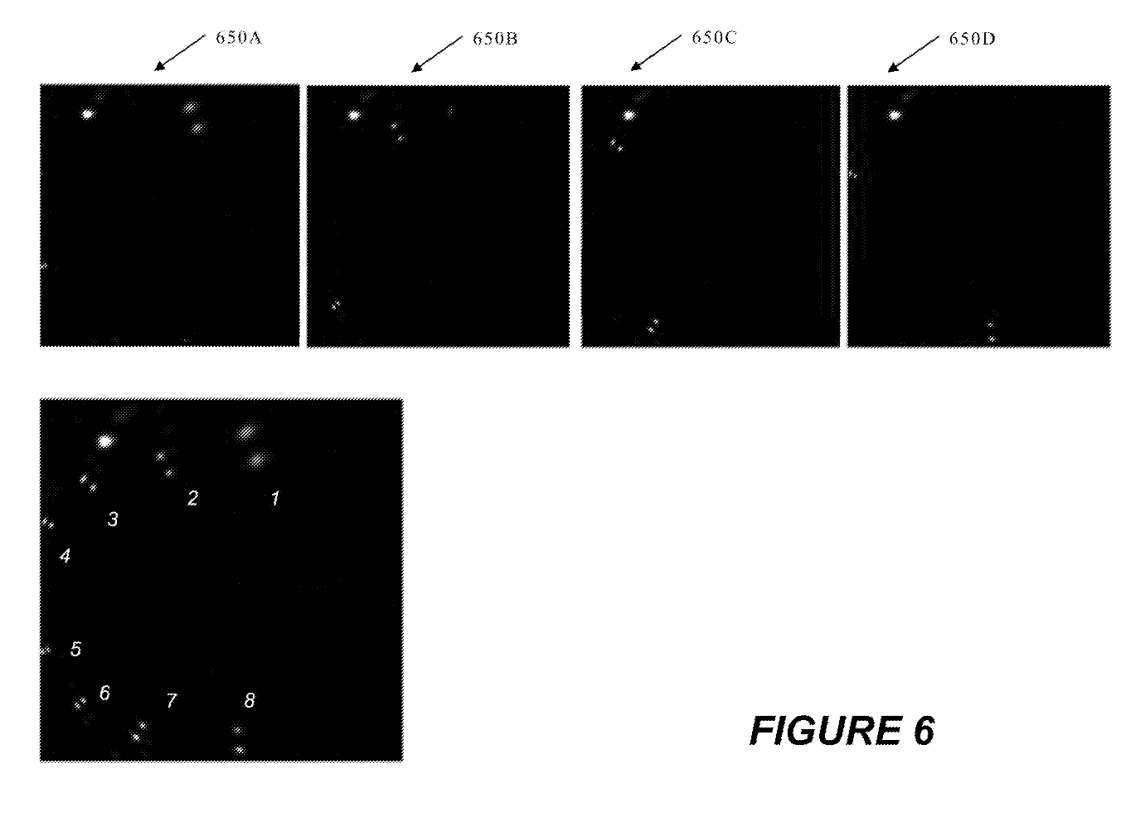
图6示出在光源分配过程中捕获的图像650A-。当打开图5B中使用的8个光源122中的两个光源122时,图像650A-D的每个图像是由图像传感器124捕获的图像。由于所述光源122和所述图像传感器124的3D空间排列已知,所以可以选择并打开所述多个光源122。非重叠定位和/或分离使系统更容易识别哪对反射对应于哪个光源。
在一个实施例中,电子设备100使用透镜表面分配过程确定每对反射的前表面反射和后表面反射。反射到透镜150的前表面和后表面的前表面分配可用于确定所安装的透镜150相对于电子设备100的位置。
在一个实施例中,将透镜150的前表面和透镜150的后表面分配给每对反射的透镜表面分配过程是基于方向、几何形状和/或距离确定。在一个实施例中,光源122、图像传感器124和附着透镜的标称位置之间的3D空间排列用于模拟由图像传感器124的图像中的光源122引起的反射图案。
例如,透镜表面分配计算第一个矢量(从第一次反射到第二次反射)和第二个矢量(从第二次反射到第一次反射),并用于与从模拟后表面反射到模拟前表面反射的模拟矢量进行比较。第一个向量或第二个向量与模拟向量匹配或对应,所以可以用来正确分配反射图案中每对反射的前表面反射和后表面反射。当只有一个反射时,使用与模拟反射位置的空间接近性比较,并将最接近的模拟反射位置与单个反射配对。
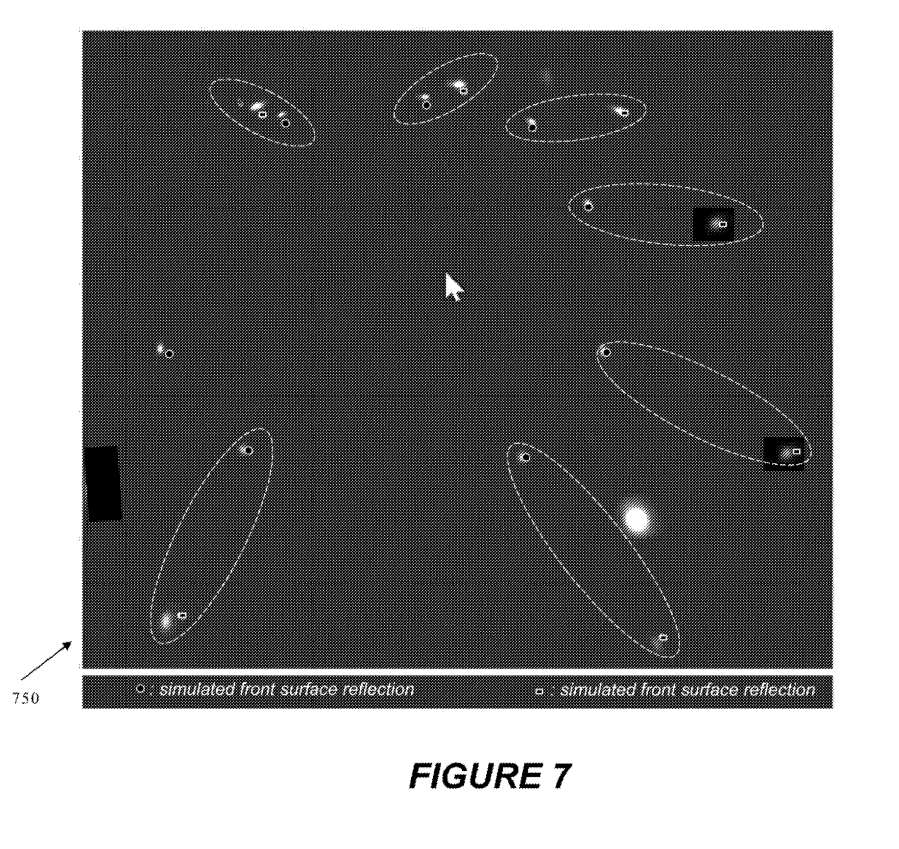
图7示出在透镜表面分配过程中捕获的示例图像。如图7所示,来自图像传感器124的图像750包括由7个光源122和所安装透镜150引起的反射图案。由先前光源分配过程确定的每对反射都包含在虚线白色椭圆中。
图像750同时包括模拟反射图案,包括模拟反射位置,模拟前表面反射由圆形表示,模拟后表面反射由矩形表示。
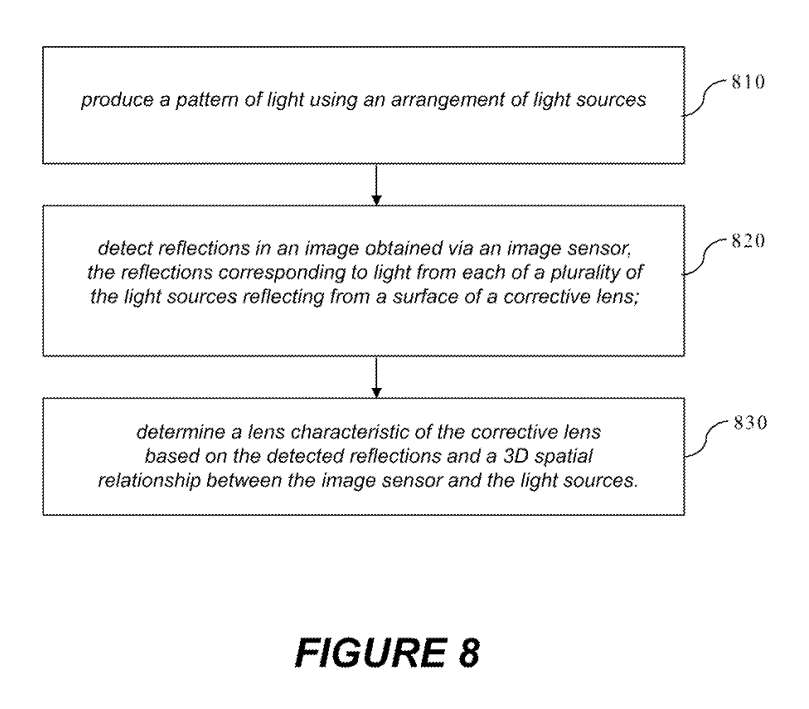
图8示出利用反射确定光学插片的透镜特性流程图。
在810,使用光源的排列产生光的图案。
在820,检测通过图像传感器获得的图像中的反射,所述反射对应于从光学插片的表面反射的多个光源中的每个光源的光。
在830,根据检测到的反射和图像传感器与多个光源之间的3D空间关系确定光学插片的透镜特征。
然后,方法800根据所述光学插片的确定透镜特征为用户提供内容。
810-830可以重复执行。
相关专利
:
Apple Patent | Identifying lens characteristics using reflections
名为“Identifying lens characteristics using reflections”的
苹果
专利申请最初在2024年3月提交,并在日前由美国专利商标局公布。