
(
映维网
2018年04月19日
)在远程操作和虚拟现实体验中,增强的触觉反馈与其他感觉线索不一致可以减少主观的现实感,从而产生触觉的恐怖谷理论。
在类人机器人领域,大多数人都已经熟悉“恐怖谷”理论:机器人过于逼真反而会令人产生不安感,甚至是厌恶感,因为机器人正变得越来越接近人类,但它们又不是真正的人类。
微软研究
团队进一步研究了这个概念,希望知道在人类与机器人交互期间,远程操作期间,或者在虚拟环境中执行其他虚拟操作任务期间,人类对力的感知(即触觉感受)是否存在恐怖谷理论。换句话说,增强机器人(或其他装置)的“实际”施加力是否必然会导致人类操作员的主观体验出现变化?
微软
研究团队认为答案是否定的:人类操作员对触觉的主观感受严重依赖于触觉和视觉刺激融合为为人类大脑的单一感知。如果触觉保真度增加,但这与其他感官反馈不一致(如视觉和听觉线索),则被试对真实感的主观印象实际上将变得更糟,而不是变得更好。映维网了解到,微软研究团队将这种退化称为触觉的恐怖谷理论。

为了演示这种效果及其应用,微软研究团队将虚拟现实系统作为实验测试台,通过运动控制器为每只手提供触觉感受。微软研究团队使用名为漏斗效应(funneling)的技巧来实现触摸错觉。漏斗效应为用户提供了来自控制器(图1C)不同振幅的同步振动触觉刺激。当人类被试在每只手中握持一个以这种方式渲染振动触觉反馈的控制器时(图1D),他们体验到了触感定位在空间之中(“空间化”)。矛盾的是,“感觉上”它们似乎是源于双手之间的空白空间。正在发生的事情是:当两个接近同步的触觉线索出现时,人类的大脑会整合将这些刺激。也就是说,大脑假设这两种刺激来自于一个共同的来源,不仅只是时间相同,空间也相同。
请注意,这个实验设置是作为一个生态意义上有效的代理,其经过了精心的设计,可以灵敏地探测触觉刺激的潜在影响,并且适用于各种远程操作任务。这很重要,因为用更高保真度的触觉感受来增强这样的任务可能会伴随着一个(经常未被说明的)假设,即这种“优化”总是会产生更真实和更逼真的虚拟环境。当然,逼真感和沉浸感是主观认知,但我们可以使用科学的临场感问卷来评估和量化它们。
在本视频中,我们将介绍一系列导致我们提出触觉恐怖谷理论的研究。恐怖谷理论最初是用来描述我们对接近于人类,但又非完美人类的超逼真机器人和角色的反感。现在我们发现,相同的效果可以出现在触觉身上。通过向两个运动控制器提供不同强度的同步振动,我们在虚拟现实中生成了一种特殊触感的幻觉。在虚拟环境中的两只手透过一个木棍彼此相连。当我们改变振动强度时,我们在画面上显示一个白色珠子撞击木棍的情景。触感似乎是位于两手之间的空白空间。当我们在不显示珠子的情况下生成相同的模拟时,这种明显的体外处触感空间定位将继续存在。但与向双手提供相同强度的普通振动相比,对触感空间化的提升形成了一种更糟糕的主观体验。当被试上下移动木棍时,体验将有所改善从而令它们成为了触觉的代理。在本论文中,我们首次说明了对触觉的优化可能会导致恐怖谷理论的出现,我们同时描绘了避免这个触觉版恐怖谷理论的关键要点。
为了更好地理解触觉感知,以及其是如何引发上述的触觉版恐怖谷(更重要的是,如何避免这一点),微软研究团队进行了数个实验。实验研究了被动触觉刺激(当人类被试被动地接收触觉刺激)与动态触觉刺激(由被试的运动触发)之间的对比。对类人机器人的研究表明,通过操纵模拟的各个方面,我们可以改变或消除经典恐怖谷理论所引起的不安感(甚至是厌恶感)。例如,卡通特征可以减少机器人的类人程度及其所带来的逼真感。为了确定被试自上而下的期望是否会影响结果,微软研究团队同时探索了因果触觉刺激,亦即用户可以合理地将其归因于外部原因。微软研究团队采取了动画云状物的形式,并且部分模糊了漏斗效应位置的视图,从而“解释”了触觉感受方面的任何差异。
微软研究团队的结果显示,被试可以在不同位置定位振动触觉刺激,并且建立空间触觉效果。但随着触觉真实感的增加超过了模拟中的互补线索(来自其他感官),整体的沉浸感也随之下降。因此,这些研究结果为上述命题提供了支持:即存在触觉的恐怖谷理论。
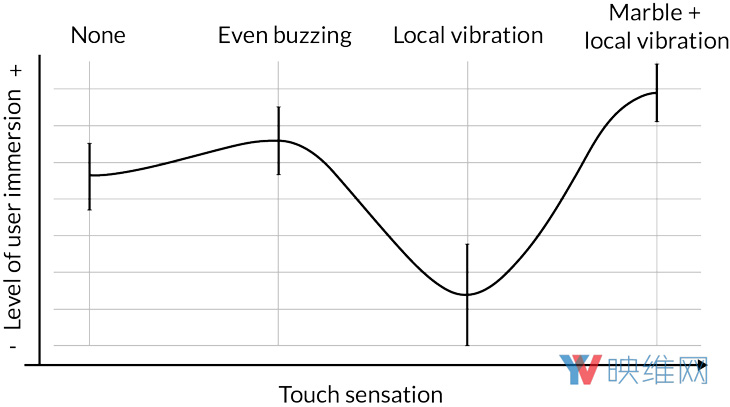
当运动控制器没有提供触感或者嗡嗡振动时,用户在VR体验里的沉浸感为适中。当控制器的振动给人一种逼真的局部触感幻觉时,用户会感到不安,而且沉浸感将降低,除非他们能够看到造成这种感觉的来源,如虚拟珠子碰到虚拟木棍。这时用户将会体验到高度沉浸感。
同样地,微软研究团队的研究结果表明技术可以减少和摆脱触觉版恐怖谷理论。例如在动态触觉刺激中,要求被试参执行一个动作足以为触觉感受提供“理由”,从而令主观经验重新与所感知的真实感保持一致。另外在微软研究团队对因果触觉刺激的研究中,提供一种“导致”感官之间不匹配的动画特征(一种移动的云状物)足以维护主观体验。
触觉的恐怖谷理论意味着人机交互设计者不能简单地认为触觉越多越好,或者说触觉越逼真越好。
随着体验不再局限于纯粹的视觉显示,并且正开始集成多种丰富的感官信息(如触觉和听觉),不匹配将成为可能,同时或许会破坏触觉渲染的“优化”。
主观不一致会在多个感官通道中产生冲突的感知。当人脑潜意识地将这些冲突线索整合到统一的感知中时,最终的结果可能会降低主观体验(即沉浸感降低)。
微软研究团队对触觉版恐怖谷理论的发现表明,我们需要把人类-机器人交互设计的重点从精度转移至情景上下文,并且需要提出一种多模式方法来实现触觉反馈,亦即将多个人类感觉通道纳入设计,渲染和对用户体验中触觉感受的评估。
尽管微软研究团队是在虚拟现实测试平台上进行了演示,但其影响根源于人类的感知,因此这可能会影响真实世界应用的真实感和沉浸感,如远程控制机器人和远程手术。希望研究提供的见解,方法论和结果可以有助于未来提高触觉效果,以及改善(而不是减损)整体的用户体验。
0